Zhenjun Zhao (赵祯俊)
I am a postdoctoral researcher at University of Zaragoza, working with Javier Civera.
I received my PhD from the Chinese University of Hong Kong (CUHK), under the supervision of Ben M. Chen.
My current research focuses on geometric modeling and optimization in 3D computer vision, aiming to develop globally optimal and learning-augmented solutions for problems such as camera geometry estimation, Structure-from-Motion, SLAM, and visual localization. My long-term research goal is to build intelligent visual systems that combine geometric reasoning, optimization, and continual learning to perceive and understand complex, dynamic 3D environments with high reliability and interpretability.

News
- 02/2026 Our paper ULF-Loc is accepted to CVPR 2026! Our paper AdaGaR is accepted to CVPR 2026 Findings!
- 01/2026 Our paper BlurPoint is accepted to ICRA 2026!
- 01/2026 Our paper NPC is accepted to ICLR 2026!
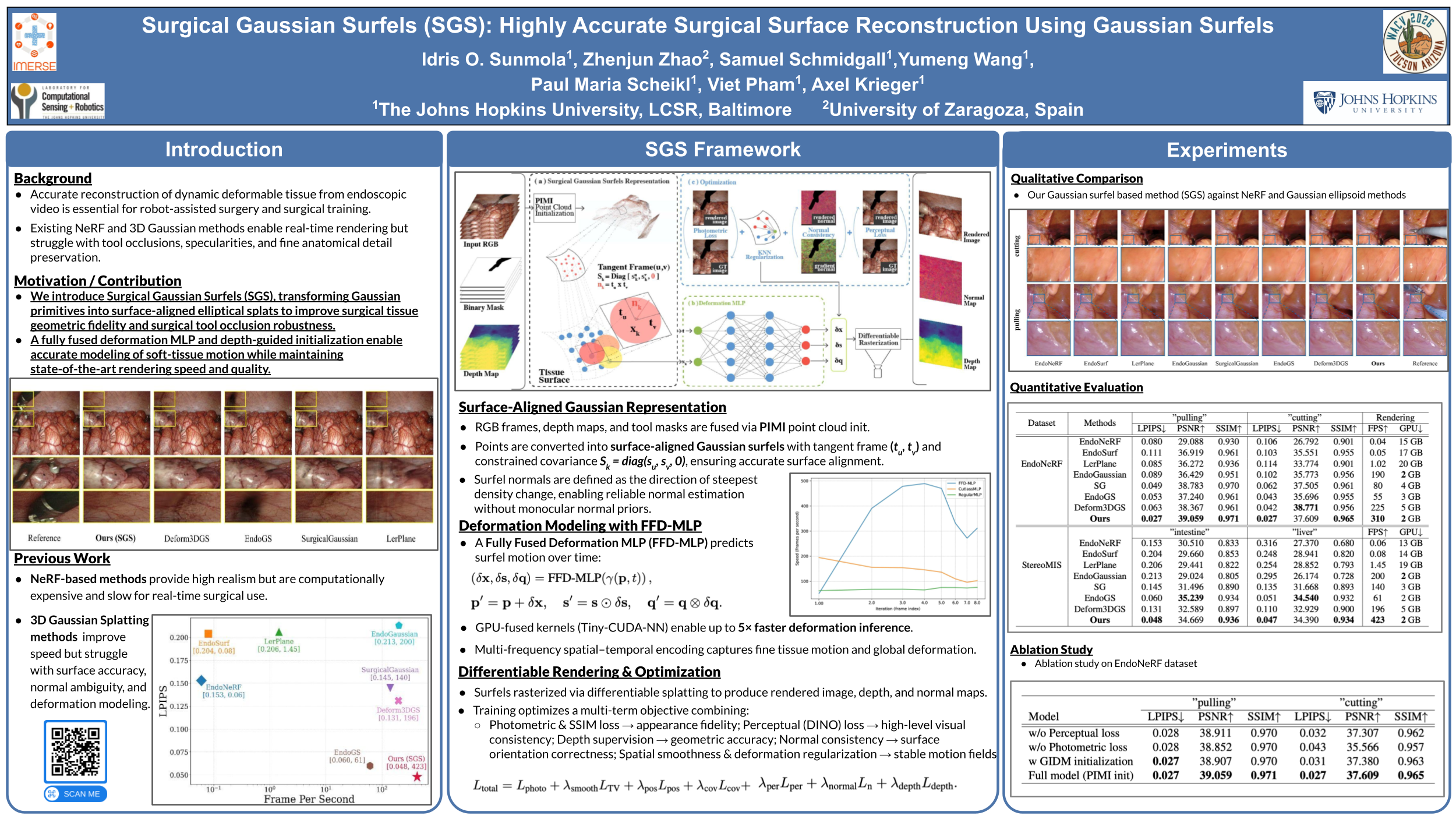
- 11/2025 Our paper SGS is accepted to WACV 2026!
- 07/2025 Our paper SLAM-X is accepted to ACM MM 2025!
Research


{kind=link}






Teaching
- Co-supervisor, Undergraduate Final Year Project, 2019–2020
- Co-supervisor, MSc Project, 2019–2020
- Teaching Assistant, Multivariable Calculus for Engineers, Spring 2021
- Teaching Assistant, Complex Variables for Engineers, Fall 2020
- Teaching Assistant, Probability and Statistics for Engineers, Spring 2020
- Teaching Assistant (Lead), Introduction to Control Systems, Fall 2019
Academic Services
- Conference Reviewer: CVPR, ICCV, ECCV, ICML, NeurIPS, ICLR, ICRA, BMVC, 3DV, WACV
- Journal Reviewer: TPAMI, IJCV